前言
正在学习操作系统,记录笔记。
参考资料:
《操作系统(精髓与设计原理 第8版) 》
第十一章:I/O管理和磁盘调度
I/O设备
I/O设备大体上可以分为如下三类:
- 人可读:顾名思义就是其面向的用户群体是人,具体有:
- 打印机
- 终端(包含:显示器、键盘、鼠标等)
- 机器可读:面向电子设备通信,具体有:
- 磁盘、磁带驱动器
- 传感器
- 控制器
- 通信:适用于与远程设备通信,如:
- 数字线路驱动器
- 调制解调器
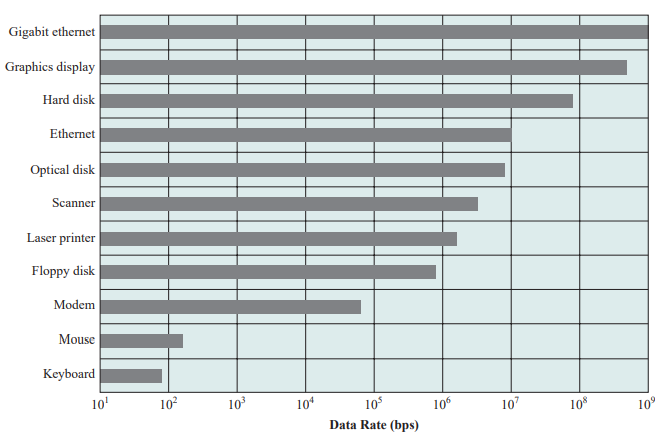
数据传送速率:不同类型的I/O设备,数据传送速率可能会相差几个数量级,如下图:
用途:设备用途对操作系统及其支撑设施中的软件和策略都有影响。
- 用于存储文件的磁盘需要文件管理软件的支持
- 虚拟内存需要特殊硬件软件支持
- 终端既可被普通用户使用,也可被系统管理员使用。
控制的复杂性:例如,打印机仅需要一个相对简单的控制接口,而磁盘的控制接口则要复杂得多。
传送单位:数据可按字节流或字符流的形式传送(如终端I/O),也可按更大的块传送(如磁盘I/O)。
错误条件:随着设备的不同,错误的性质、报告错误的方式、错误造成的后果及有效的响应范围,都各不相同。
以上的差异使得不管是从操作系统的角度,还是从用户进程的角度,都很难找到一种统一的、一致的I/O解决方法。
I/O功能的组织
有三种执行I/O的技术(具体可以看第一章的内容,这里不过多介绍):
-
可编程I/O:处理器代表一个进程给I/O模块发送一个I/O命令;该进程进入忙等待,直到操作完成才能继续执行。
缺点:当执行I/O操作时,处理器容易进入忙等待状态(空闲),造成处理器资源浪费。
-
中断驱动I/O:处理器代表进程向I/O模块发出一个I/O命令。有两种可能性:
-
若来自进程的I/O指令是非阻塞的,则处理器继续执行发出I/O命令的进程的后续指令。
-
若I/O指令是阻塞的,则处理器执行的下一条指令来自操作系统,它将当前的进程设置为阻塞态并调度其他进程。
引入中断机制。
缺点:虽然缓解了忙等待状况,但是最后数据在I/O设备与主存之间传输的过程要依赖于处理器。
-
-
直接存储器访问(Direct Memory Access,DMA):一个DMA模块(作为“代理CPU”)控制内存和I/O模块之间的数据交换。为传送一块数据,处理器给DMA模块发请求,且只有在整个数据块传送结束后,它才被中断。
数据在I/O设备与主存之间传输的整个过程只产生两次中断:
- 在调用I/O设备前,处理器向I/O设备发出指令
- 数据传输完之后,DMA模块向I/O设备发出中断(告知“数据传输完毕”)
优势:数据在I/O设备与主存之间传输不依赖于处理器。
小结I/O执行技术
| 无中断 | 使用中断 | |
|---|---|---|
| 通过处理器实现I/O和内存间的传送 | 可编程I/O | 中断驱动I/O |
| I/O和内存间直接传送 | 直接存储器访问(DMA) |
I/O功能的发展
-
处理器直接控制外围设备:这在简单的微处理器控制设备中可以见到。
-
增加了控制器或I/O模块:引入无中断的可编程I/O。
从该阶段开始,处理器无需处理外部设备的细节。
-
同上一阶段基本相同,但是采用了中断的方式:处理器无须费时间等待执行一次I/O操作,因而提高了效率。
-
DMA模块的引入:数据块在I/O设备和内存中移动无需处理器参与,仅在传送开始和结束时才需要用到处理器。
-
I/O模块有一个独立处理器:有专门为I/O设计的指令集,中央处理器指导I/O处理器执行内存中的一个I/O程序。I/O处理器在没有中央处理器干涉的情况下取指令并执行这些指令。这就使得中央处理器可以指定一系列的I/O活动,且仅在整个序列执行完成后中央处理器才被中断。
该阶段的I/O模块通常称为:I/O channel (I/O通道)
-
I/O模块有自己的局部存储器,事实上其本身就是一台计算机:
- 使用这种体系结构可以控制许多I/O设备,并使需要中央处理器参与的部分降到最小
- 这种结构通常用于控制与交互终端的通信,I/O处理器负责大多数控制终端的任务
该阶段的I/O模块通常称为:I/O processor (I/O处理器)
直接存储器访问(DMA)
下图是典型的DMA框图
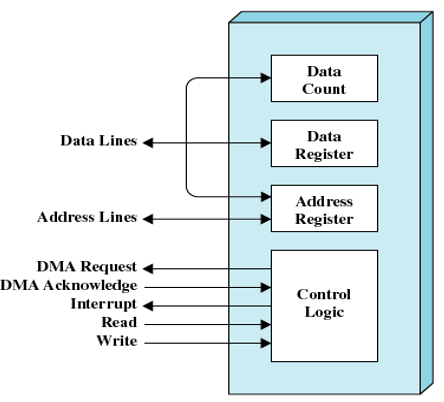
说明:
- Data Count:保存此次传输的数据的字节数
- Data Register:存放正在传输的数据
- Address Register:基址寄存器
- Control Logic:其他的一些功能
DMA工作流程:
- 处理器和DMA模块之间有读写控制线,基于此处理器可以向DMA模块发送命令(请求I/O)
- DMA模块直接负责I/O设备到内存之间的数据传输(不需要处理器)
- 在数据传输完之后,DMA模块向处理器发送一个中断信号
DMA机制的配置:
-
所有模块共享同一个系统总线:

- DMA模块充当代理处理器
- 同一时刻只允许一个I/O设备和主存进行交互,否则会出现数据冲突
- 同一个时间段可以有多台I/O设备和主存进行交互——分时复用
- 排队的情况很严重,虽然这样的设计开销不大,但是效率很低
-
集成DMA和I/O:
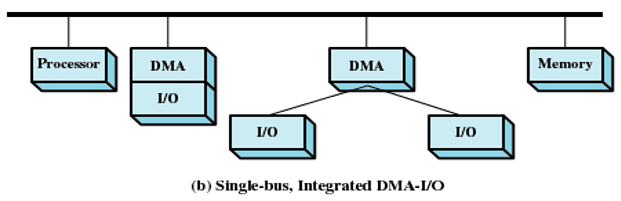
-
减少了I/O对DMA模块的竞争
在DMA模块和一个或多个I/O模块之间还存在一条不包含系统总线的路径。DMA逻辑实际上可能就是I/O模块的一部分,或可能是控制一个或多个I/0模块的一个单独模块。
-
-
增加I/O局部总线:
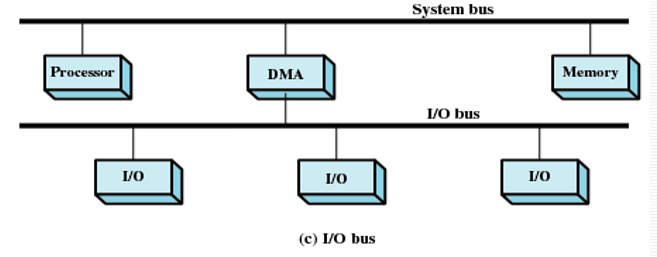
- DMA模块中I/O接口的数量减少到1
- 易扩展
第二、三种方式:DMA和I/O模块之间的数据交换是脱离系统总线完成的。
操作系统设计问题
设计目标
在设计I/O机制时,最重要的两个目标就是:效率(Efficiency)、通用性(Generality)。
-
效率:
-
I/O操作通常是计算机系统的瓶颈。
之前也提到过,大多数I/O设备都是机械运动,而处理器是电信号的处理,二者的速度差距在几个数量级。
-
解决上述问题的一种方式是引入多道程序设计。这样可以缓解,但不能彻底解决问题。我们想象一种极端情况:在并发度达到最大时,所有的进程都在等待I/O设备,那么这时也会出现CPU空闲状态,效率并不能有效提高。
-
于是引入交换技术。用于将额外的就绪进程加载进内存,从而使处理器处于工作状态。(这本身就是一个I/O操作)
-
-
通用性:处于简单和避免错误的考虑,希望能用一种统一的方式处理所有设备。
注:有些版本将“通用性”翻译为“设备的独立性”。
-
处理器看待I/O设备的方式统一。
-
操作系统管理I/O设备和IVO操作的方式统一。
由于设备特性的多样性,在实际中很难真正实现通用性。
目前所能做的就是用一种层次化、模块化的方法设计I/O功能。这种方法隐藏了大部分I/O设备低层例程中的细节,使得用户进程和操作系统高层可以通过如读、写、打开、关闭、加锁和解锁等通用的函数来操作I/O设备。
-
I/O功能的逻辑结构
分层的原理是:操作系统的功能可以根据其复杂性、特征时间尺度和抽象层次来分开。
将分层原理应用于I/O机制,具体如下图:
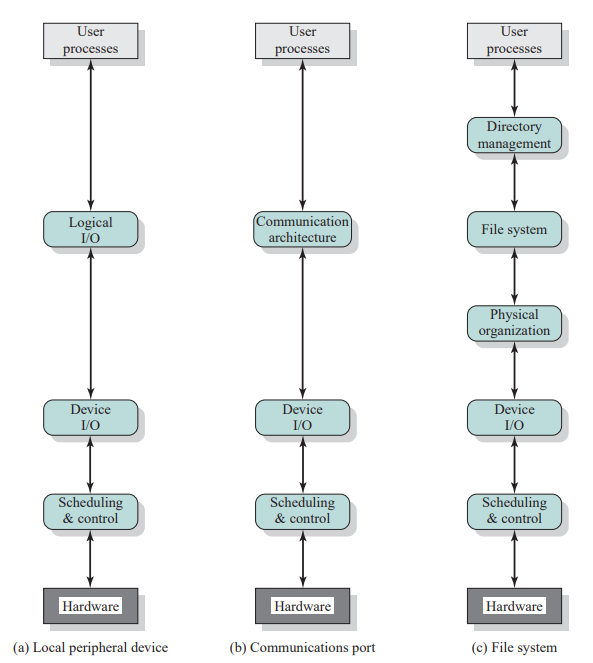
说明:
- 逻辑I/O(Logical I/O):逻辑I/O模块把设备当作一个逻辑资源来处理,它并不关心实际控制设备的细节。
- 设备I/O(Device I/O):请求的操作和数据(缓冲的数据、记录等)被转换为适当的I/O指令序列、通道命令和控制器命令。
- 调度和控制(Scheduling & control):I/O操作的排队、调度实际上发生在这一层。
- 目录管理(Directory management):在这一层,符号文件被转换为标识符,采用标识符时可通过文件描述符表或索引表直接或间接地访问文件。
- 文件系统(File system):这一层处理文件的逻辑结构及用户指定的操作,如打开、关闭、读、写等。这一层还管理访问权限。
- 物理组织(Physical organization):考虑到辅存设备的物理磁道和扇区结构,对于文件和记录的逻辑访问必须转换为物理外存地址。辅助存储空间和内存缓冲区的分配通常也在这一层处理。
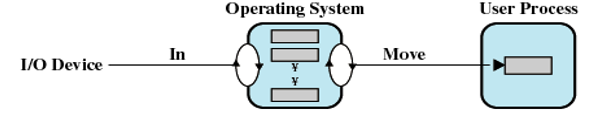
I/O缓冲
缓存(buffering)的原因:
- 处理器在I/O完成之前必须等待
- 在页交换的过程中,某些页必须驻留内存
缓存(buffer):内存当中预留的一个区域,用来暂存I/O通讯的数据。
举例:
- printf函数:可能有时候会出现明明在程序中写了printf,但是并没有如期望般那样得到输出结果。这是因为printf是一个带缓冲的输出打印。printf本身会调用一个系统调用,会产生进程切换,如果仅为了打印一句“Hello World”就使用进程切换,可以认为这是没必要的。所以会当缓冲区满了的时候再一次性打印出来。(如果必要,我们也可以用fflush去强制清除缓存,将其打印出来)
- 打印机:在使用打印机的时候可以看到计算机屏幕上显示进度条(完成一页、两页…),待到进度条完成之后,打印机才开始工作。进度条展示的其实就是将数据存储到缓冲区的进度,当执行完成后,处理器就可以完成其他的任务去了,接下来才是打印机去访问缓冲区,将数据真实地打印出来。
优点:
- 可以让CPU和I/O并行操作
- 减少中断次数
- 提高CPU效率
缓冲的定义:在输入请求发出前就开始执行输入传送,并且在输出请求发出一段时间之后才开始执行输出传送。
光看定义可能有些不知所云,往下看,慢慢体会。
在讨论各种缓冲方法之前,首先要区分两类I/O设备:
- 面向块(Block-oriented)的I/O设备:
- 将信息保存到固定大小的块中
- 传送过程中一次传输一块
- 通常可以通过块号访问数据
- 举例:磁盘、磁带、USB智能卡
- 面向流(Stream-oriented)的I/O设备:
- 以字节流的方式输入\输出数据
- 举例:终端、打印机、通信端口、鼠标和其他指示设备及其他大多数非辅存设备
单缓冲
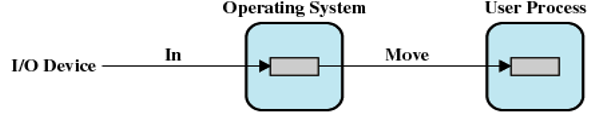
- I/O设备先将传送的数据移入到系统缓冲区中(I/O → 内存)
- 上一步传输完成时,进程把该块移动到用户空间(内存 → 内存)
- 紧接着,根据局部性原理,会预先请求另一个数据块,将其移入缓冲区(预读;或预先输入)
优点:
- 用户进程可在下一数据块读取的同时,处理已读入的数据块
- 输入发生在系统内存而非用户进程内存,因此操作系统可以将该进程换出
缺点:
-
操作系统必须记录给用户进程分配系统缓冲区的情况
操作系统维护用户进程系统缓冲区。
-
交换逻辑也受到影响
I/O操作所涉及的磁盘和用于交换的磁盘是同一个磁盘时,磁盘写操作排队等待将进程换出到同一个设备上是没有任何意义的。若试图换出进程并释放内存,则要在I/O操作完成后才能开始,而在这时,把进程换出到磁盘已经不再合适。
面向流的单缓冲:
- 每次传送一行的方式或每次传送一字节的方式
- 用户在终端每次输入一行,用回车表示到达行尾
- 输出到终端时也是类似地每次输出一行
双缓冲
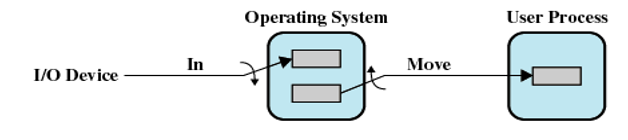
-
在内存中为操作系统分配两个系统缓冲区
-
输入输出交替使用
在一个进程向一个缓冲区中传送数据(从这个缓冲区中取数据)的同时,操作系统正在清空(或填充)另一个缓冲区,这种技术称为双缓冲(double buffering)或缓冲交换(buffer swapping)。
循环缓冲
- 内存中有两个以上的缓冲区
- 每个单缓冲区是循环缓冲器的一个单元
- 平滑I/O操作和进程之间的数据流
磁盘调度
磁盘性能
磁盘的内部结构如下图:
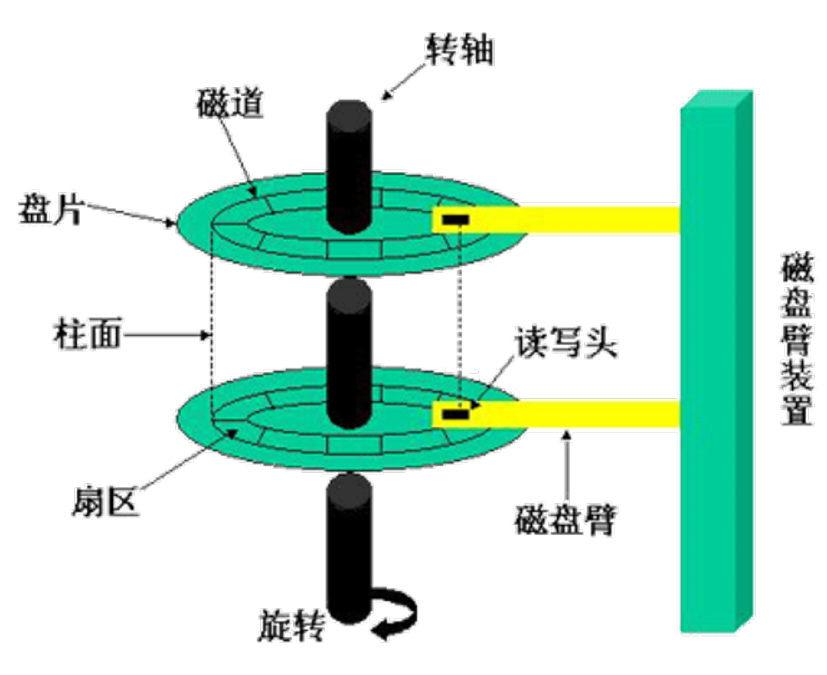
说明:为了读或写,磁头必须定位于指定的磁道和该磁道中指定扇区的开始处。
磁盘性能参数:
- 寻道时间(Seek time ):磁头定位到磁道所需要的时间称为寻道时间。
- 旋转延迟(Rotational delay ):磁头到达扇区开始位置的时间称为旋转延迟。
- 传输时间(transfer time):磁头定位完成就开始读操作或写操作,这就是数据传输,传输的时间就是传输时间。
磁盘调度(重点):

上图为磁盘I/O传送的一般时序图:
等待I/O设备 → 等待通道 → 寻道(确定磁道) → 旋转延迟(确定扇区) → 数据传输延迟
相关计算:
传输时间:
- T:传输时间
- b:要传送的字节数
- N:一个磁道中的字节数
- r:旋转速度(单位:转/秒)
总平均存取时间:
- Ts:平均寻道时间
磁盘调度策略
不同磁盘调度的性能差异的原因可以追溯到寻道时间。因此为了提高性能,需要减少花费在寻道上的时间。
考虑多道程序环境中的一种典型情况:即操作系统为每个I/O设备维护一个请求队列。
- 对于一个磁盘来说,队列中可能有来自多个进程的许多I/O请求(读和写)
- 随机调度(random scheduling):随机访问磁道。该种方法性能最差,可用于评估其他技术。
下面我们将会介绍八种磁盘调度策略,在介绍时会统一以一个例子进行:
例子:
假设磁盘有200个磁道,磁盘请求队列中是一些随机请求。被请求的磁道,按照磁盘调度程序的接收顺序分别为:
55、58、39、18、90、160、150、38、184
说明:
假设以磁道号为100处开始寻道。
具体以折线图的形式展示:纵轴表示磁盘上的磁道;横轴表示时间(或跨越磁道的数量)。
优先级(Priority,PRI)
- 此方法不会优化磁盘的利用率
- 通常较短的批作业和交互作业的优先级较高
- 可以提供较好的交互响应时间
先进先出(First-in First-out,FIFO)
处理请求的顺序(如下图):55、58、39、18、90、160、150、38、184
- 这是最简单的调度策略
- 按照收到请求的顺序进行处理
- 优点:公平对待每个请求
- 缺点:并未对磁头的访问有任何优化,效率最差。在多进程环境中,性能接近随机调度。
后进先出(Last-in First-out,LIFO)
处理请求的顺序:184、38、150、160、90、18、39、58、55
-
考虑到了局部性原理
在事物处理系统中,由于顺序读取文件的缘故,把设备分配给最后到来的用户,可减少磁臂的运动,甚至没有磁臂运动。
-
缺点:可能会产生饥饿
假设队列中不停地有新的请求,那么最先进入队列的请求很可能饥饿。
最短服务时间优先(Shortest Service Time First ,SSTF)
处理请求的顺序(如下图):90、58、55、39、38、18、150、160、184
-
策略:选择使磁头臂从当前位置开始移动最少的磁盘I/O请求(如果两个距离相等,随机选择方向)
-
总是选择最小寻道时间的请求
考虑的指标太单一,并不能保证平均寻道时间最小
-
可能会产生饥饿
如果不停有新的请求,该请求距离磁头很近,那么距离磁头较远的请求可能饥饿。
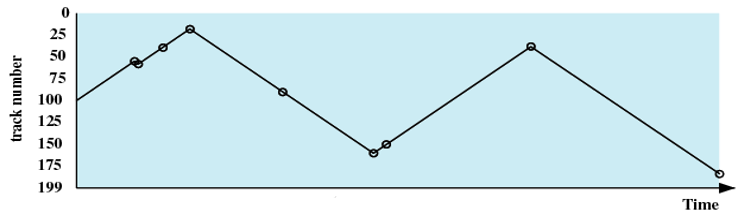
SCAN(扫描,电梯算法)
处理请求的顺序(如下图):55、58、39、18、90、160、150、38、184
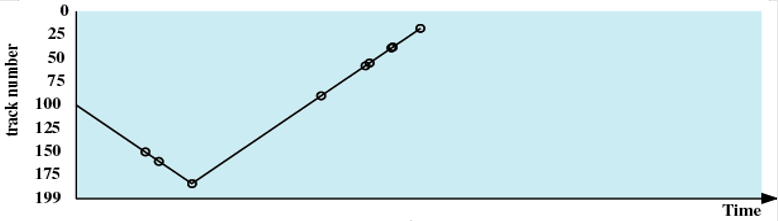
-
策略:磁头臂仅沿一个方向移动,并在途中满足所有未完成的请求,直到它达到这个方向上的最后一个磁道,或者在这个方向上没有其他请求为止,反转扫描方向。
考虑了局部性原理
这种定向移动的形式类似于电梯,因此也被称为“电梯算法”。
-
可以解决饥饿
-
问题:基于该例假设,假设在处理完184号磁道请求之后,磁头反向扫描,这时又有新的185号磁道访问请求,那么磁头会扫描一轮之后再回来处理,显然是不合理的。
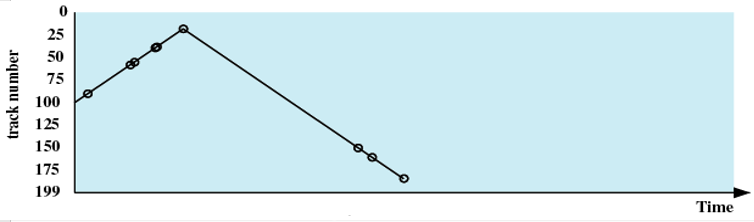
C-SCAN(循环扫描)
处理请求的顺序(如下图):55、58、39、18、90、160、150、38、184
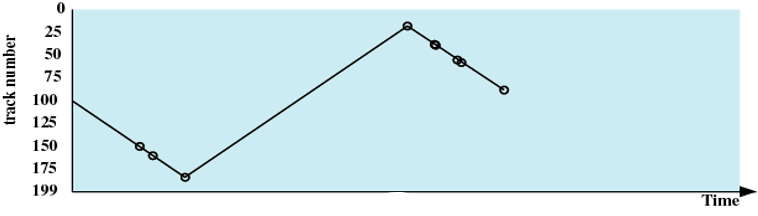
- 策略:将扫描方向固定。当访问到沿某个方向的最后一个磁道时,磁头臂返回到磁道相反方向末端的磁道。
- 可以解决SCAN的问题。减少了新请求的最大延迟。
N-step-SCAN
- 将磁盘请求队列划分为长度为N的n个子队列
- 对于n个子队列采取FIFO算法
- 对于子队列中的N个请求,采取SCAN算法
- 如果有新的请求,将其添加到新的队列中去
FSCAN
- 使用两个子队列
- 扫描开始时,所有请求都在一个队列中,另一个队列为空。
- 在扫描过程中,所有新到的请求都放入另一个队列。
磁盘调度算法比较
比较FIFO、SSTF、SCANF、C-SCAN算法,如下图:
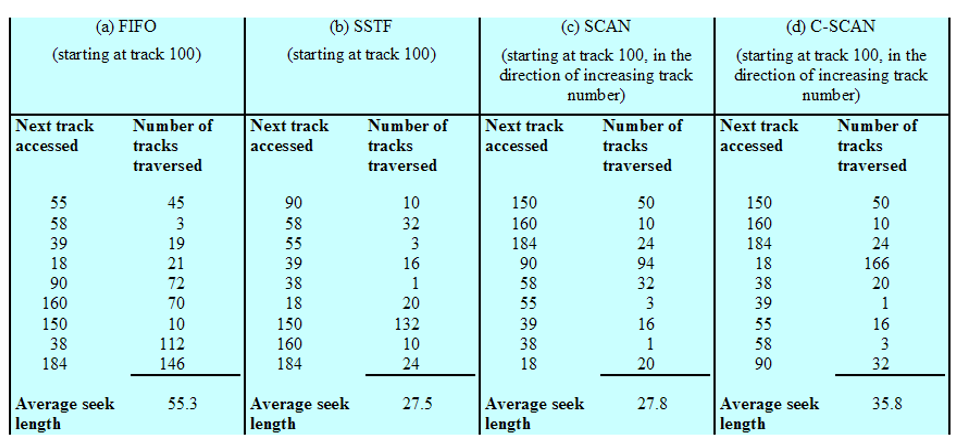
注意:计算平均寻道时间时,注意分母的取值。
以FIFO为例
- 从磁道100处开始:
- 从磁道55处开始:
注意磁头开始的位置
RAID
受限于技术,磁盘存储器的大小并不能无限扩大,虽然技术在不断进步,其大小也在逐渐增大,但要意识到一个问题,现实中我们对于磁盘存储的需求可能要远远大于其实际容量。
设计人员认识到这个问题,并提出了并行使用多个磁盘的方案。
独立磁盘冗余阵列(Redundant Array of Independent Disks,RAID):
- 物理上通过多个磁盘组成一个磁盘组,在逻辑上这是一个大容量的磁盘
- 使用冗余磁盘容量保存奇偶检验信息,保证在一个磁盘失效时,数据具有可恢复性
RAID包含0~6共七个级别,这里仅介绍RAID0、RAID1、RAID5
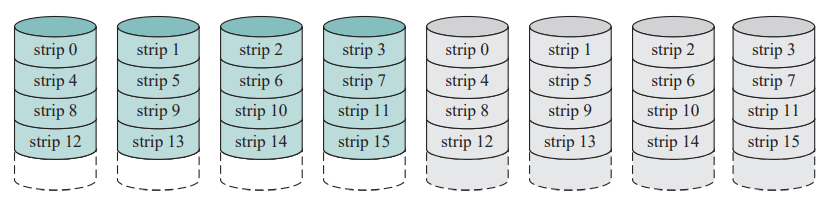
RAID0
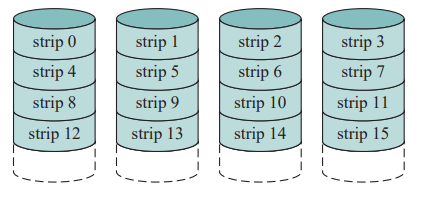
- 实现高数据传送能力
- 实现告诉I/O请求率
RAID1
- 读请求可由包含被请求数据的任何一个磁盘提供服务,而不管哪个磁盘拥有最小寻道时间和旋转延迟。
- 写请求需要对两个响应的条带进行更新,但这可并行完成。
- 从失效中恢复很简单:当一个驱动器失效时,仍然可以从第二个驱动器访问到数据。
RAID5
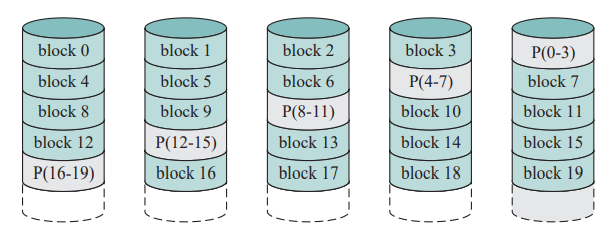
- 把奇偶校验条带分布在所有磁盘中。
后记
本篇已完结
(如有修改或补充欢迎评论)